המתנדים
מ ת נ ד י ם הם מעגלים אלקטרוניים שבעזרתם הופכים אנרגית זרם ישר, המתקבל מספקי- כוח, להספק זרם חילופין, ללא עזרת אות מבוא חיצוני. מעגלי מתנדים מאפשרים היווצרות אותות בעלי צורות שונות ותדרים שונים על ידי בחירת המעגל המתאים לכל צורך.
ניתן לסווג את מעגלי המתנדים, לפי צורת הגל שהם יוצרים, לשני סוגים עיקריים:
א) מתנדים לאות הרמוני - היוצרים גלים שצורתם קרובה מאוד לאות סינוסוידלי;
ב) מתנדים לאותות לא סינוסוידליים- יוצרים אותות שצורתם אינה תנודה הרמונית, כגון: גל
ריבועי , גל משולש או גל שן - משור וכדומה;
גם את קבוצת מתנדים הרמוניים ניתן לחלק לשתי קבוצות עיקריות:
א) מתנדים אשר עיקרון פעולתם מבוסס על שימוש במשוב חיובי ;
כשמערכת המשוב מורכבת מסלילים וקבלים, נקרא המתנד - מתנד LC .
במקרה שהמערכת משוב מורכבת מנגדים וקבלים - זו מתנד RC .
ב) מתנדים בהם אנו מפעילים רכיבים בעלי התנגדות דינאמית שלילית, כגון: טטרודה
(שפופרת ריק, בעלת שני סריגים ) או דיודת מנהרה .
קיימת שיטה נוספת לסווג את המתנדים לפי סוג המשוב והצימוד הקיים בהם.
1. מתנדים בצימוד שנאי :
א. מכוון במוצא (Armstrong או Tickler )
ב. מכוון במבוא.
2. מתנדים בצימוד ריאקטיבי ( מעגלי תהודה ) :
א. מתנד קולפיץ (Colpitts);
ב. מתנד הרטלי ( Hartley );
ג. מתנד קלאפ ( Clapp );
3. מתנדי גביש :
א. מתנד גביש בתהודה טורית (Batler ) ;
ב. מתנד גביש בתבנית של מתנד קולפיץ ( Pierce ) ;
ג. מתנד גביש בתבנית הרטלי ( Miller ) ;
ד. מתנד גביש הרמוני ( Overtone ) ;
ג. מתנד גביש בתבנית הרטלי ( Miller ) ;
ד. מתנד גביש הרמוני ( Overtone ) ;
4. מתנדים עם שינוי תדר :
א. מתנד עם שינוי תדר מכני ( בעזרת קבל או סליל משתנה ) ;
VFO – Variable Frequency Oscillator
VFO – Variable Frequency Oscillator
ב. מתנד גבישי עם שינוי תדר ;
VFO – Variable Frequency Crystal Oscillator
VFO – Variable Frequency Crystal Oscillator
ג. מתנד מבוקר מתח Voltage Controlled Oscillator -
תמונות לדוגמא:-

מאפיינים העיקריים של מתנדי ת"ר הם:
א. תדר התנודות -(תחום התדרים שבו ניתן לשנות את תדר המתנד ע"י בקרה חיצונית )
ב. הספק המוצא.
ג. יציבות התדר כנגד השינויים בטמפרטורת העבודה, מתח ההפעלה , בעומס ובזמן.
ד. עיוותים הרמוניים ורעש העצמי של המתנד.
יציבות של מתנדים
מרבית המתנדים לתדר רדיו עובדים עם ייצוב עצמי של התנודות ( ע"י אופיין לא ליניארי ). לכן , הקטנת העוצמה במתנד מתחת לסף מסוים.
ברוב מעגלי המתנדים הדרישה ליציבות תנופה אינה חמורה , ושינויים קלים בעוצמה אינם מפריעים לפעולת המערכת שבה מורכב המתנד.
מדוע חשוב לבנות מתנד בתדר גבוהה?!:-
בניית מתנד בתדר גבוהה במערכת התקשורת תומך שתהיה חסינה יותר מפני רעשים שהם בעצם השפעת שינויי מזג האויר והמרחק הגדול שהאות עובר,זה שגורם לניחות ועיוותים באות.
מתנדב תדר גבוהה שמשולב במעגלי המחשב מבטיח מחשב בעל תגובה מהיר וביצוע בקשות באופן מהיר.
קביעת הערכים וחישובם:-



בניית המעגל של מתנד גשר ויין :-
למגבר שרת בהדק החיובי מחברים נגד של 1000אוהם מאותה נקודה מציאים חיבור נגד של2100אוהם למוצא המגבר, שנקבל הגבר הגדול בקצת מ-3.
למגבר שרת בהדק החיובי מחברים נגד של 1000אוהם מאותה נקודה מציאים חיבור נגד של2100אוהם למוצא המגבר, שנקבל הגבר הגדול בקצת מ-3.
בהדק השלילי מחברי בטור את שתי העכבות (המקבילית והטורית),כל עכבה מהווה בעצם נגד ו קבל,לשני קבלים אילו יש אותו ערך ולשני הנגדים יש אותו ערך,ערכם נקבע לפי התכנון הנ"לומחברים את חיבור העכבות למוצא.
אנו מחברים מתח ישר שלילי וחיובי למגבר שמהווים מתחי הרוויה למתנד.
,אחר כך מחברים את מוצא המגבר למשקף התנודות על מנת להתציג את התנודות במישור הזמן.

תוצאות:-
זהו מצב אידאלי של תנודות שמקבליםעבור A*B=1:-

אבל מצב זה איי אפשר לקבלו בגלל חוסר ליניאריות במגבר ועוד כי איי- אפשר למלא בקשתנו בתוכנית ההדמיה "מולטיזים" ,והתוצאות שבעצם אנו מקבלים הן כבא:-
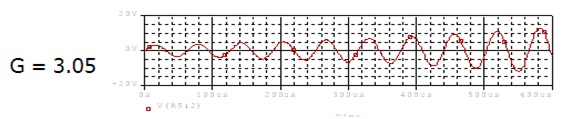
חיבור גשר ויין A*B>1 :-

מצב לא רצוי:-
A*B<1:-
במצב זה תחילה אנו מקבלים תנודות שהן בעוצמה טובה אבל במשוב ההגבר לשבר הולך וקטן ,וזה מסביר למה התנודות הולכות ומתמזערות עם עבירת הזמן עד שמתאפסות.


A*B>1:-
במצב זה ההגבר של עוצמת התנודות הולך וגדל וגדל עד שמגיעה עוצמתם לעוצמת מתחי הרוויה,וכך האות נקטם ,מצב זה נקרא מצב רוויה ,שבו אנו מאבדים את האות,וכמובן מצב זה לא רצוי.

מסקנה :-
המצב ההכי טוב באופן מעשי הינו A*B>1 ,שבו ההגבר גדול בקצת משלוש,ולא שלוש בדיוק שעבורו מקבלים אות סינוסי באותו תדר שאנו קובעים .
תוכנית המולטיזים הינה תוכנית מצוינת כי יכלנו לתכנת מתנד לגשר ויין בקלות ובהצלחה.
סירין בסדר קיבלת אישור
השבמחקבהצלחה
מאמון
תודה רבה!!
השבמחקיעטיקי אלעאפיה סירו משקיעה ובגדול האי עאלם בדהא תתעלם אללה יסעדק וינגחק יא רב
השבמחקעבובדה יפה
השבמחקכל הכבוד